



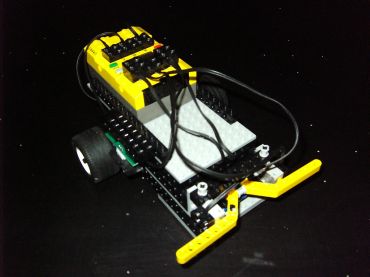
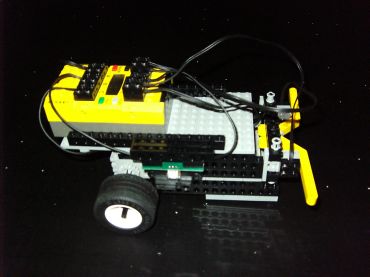
Na súťaži Istrobot sa už každoročne zúčastňujeme kategórie stopár. Robot Beanpole je stopár, ktorý bol postavený pôvodne na medzinárodnú súťaž RobotChallenge 2006. Keďže na tejto súťaži robot uspel (získal 2. miesto v kategórii Slalom Enhanced), rozhodol som sa ho mierne upraviť (ide rýchlejšie ale občas sa chová divne) a prihlásiť aj na súťaž Istrobot 2006. Robot používa neLego snímač Sharp GP2D120 (detekcia tehly pomocou odrazeného infračerveného svetla, aby prešiel okolo (takmer) akejkoľvek tehly. Na detekciu čiary používa dve dvojice LegoLight snímačov a podvozok robota je nasvietený dvomi IR LED diódami napájanými 9V batériou.

Procesor: Lego RCX (Hitachi H8)
Pamäť: 32kB
Frekvencia: 16MHz
Snímače: 4x LegoLight, 2x LegoTouch, 1x Sharp GP2D120 IDS (Infrared Distance Sensor)
Pohon: 2x Lego motor
Napájanie: 6x 1.2V NiMH, 1x 9V
Jazyk: NQC
Ak je čiara pod akoukoľvek dvojicou LegoLight snímačov, robot ide rovno.
Robot si pamätá, pod ktorou dvojicou LegoLight snímačov naposledy videl čiaru a ak čiaru nevidí, zatočí tým smerom, kde čiaru naposledy videl. Zároveň sa spustí časovač a ak do istého času (konštanta v programe) čiaru nenájde, znamená to, že robot je v prerušení čiary. Po oblúku sa vráti naspäť na miesto kde čiaru stratil, popojde kúsok dopredu a opakuje hľadanie (robot vyzerá akoby kosil).
Ak robot narazí na tehlu (stlačený LegoTouch snímač), zacúva a otočí sa doľava. Tehlu bude obchádzať zľava. Potom na základe snímača vzdialenosti Sharp GP2D120 ide buď vpravo bližšie k tehle, alebo vľavo ďalej od nej. Ak by aj náhodou do nej narazil, znova sa otočí vľavo a pokračuje v obchádzaní. Keď pri obchádzaní tehly nájde čiernu čiaru, vyjde až poza ňu a začne hľadať čiaru, ktorá sa nachádza vľavo od robota.