



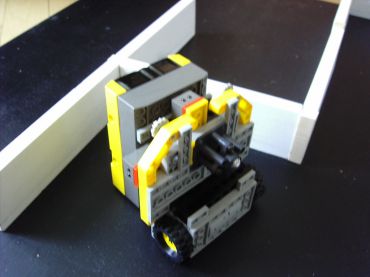
Myš v bludisku, ktorá
používa tri neLego EOPD snímače (ElectroOptical
Proximity Sensor – detekcia stien pomocou odrazeného
viditeľného svetla). Bludisko, ktoré
sa používa na Istrobote je navrhnuté tak, aby sa dalo
prejsť aj pravidlom pravej aj pravidlom ľavej ruky. V tomto
bludisku však neplatí, že cesta po ľavej a pravej strane je
rovnako dlhá. Preto má robot tri snímače, aby
sa dalo naprogramovať aj pravidlo pravej aj ľavej ruky bez
mechanických úprav robota a tak počas dvoch jázd
zistiť kadiaľ to ide rýchlejšie. Robot Dlžiansky potkan zvíťazil v
medzinárodnej súťaži autonómnych mobilných robotov Istrobot 2006 v
kategórii Myš v bludisku (Micromouse).


Procesor: Lego RCX (Hitachi H8)
Pamäť: 32kB
Frekvencia: 16MHz
Snímače: 3x EOPD (ElectroOptical Proximity Sensor)
Pohon: 2x Lego motor
Napájanie: 6x 1.2V NiMH
Jazyk: NQC
Ak je pred robotom stena, otočí sa o pravý uhol doľava. Ak pred ním stena nie je, pohybuje sa v závislosti od snímača na pravej strane. Ak je príliš blízko pravej steny, tak vybočí smerom vľavo. Ak je príliš ďaleko od pravej steny, tak vybočí smerom vpravo. Ak je od pravej steny v optimálnej vzdialenosti (rozsah je daný konštantou v programe), tak ide rovno.
Ak je pred robotom stena, otočí sa o pravý uhol doprava. Ak pred ním stena nie je, pohybuje sa v závislosti od snímača na ľavej strane. Ak je príliš blízko ľavej steny, tak vybočí smerom vpravo. Ak je príliš ďaleko od ľavej steny, tak vybočí smerom vľavo. Ak je od ľavej steny v optimálnej vzdialenosti (rozsah je daný konštantou v programe), tak ide rovno.