



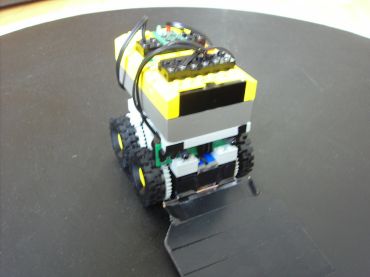
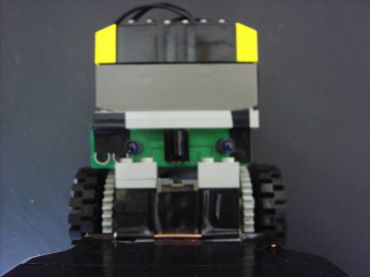
Od minulého roka súťaže Istrobot pribudla nová kategória Mini Sumo. Podľa pravidiel tejto kategórie robot nesmie presiahnuť váhu 500g a rozmery 10x10cm. Úlohou robota je vytlačiť súpera z ringu. Robot Trasoriťka používa jednu naberačku na to, aby ňou podchytil súpera. Súper bude na zemi bez dvoch kolies, teda bude slabší, lebo bude nadarmo poháňať dve kolesá a bude sa dať ľahšie vytlačiť. Robot Trasoriťka používa neLego snímač DROD56 (Short Range Dual Infra Red Obstacle Detector – pomocou odrazeného infračerveného svetla zistí nielen, či sa pred robotom nachádza súper, ale aj v ktorom smerom sa nachádza a neLego výstupný prvok Light Emitting Brick Kit, ktorý ak detekuje súpera, tak svieti zelená LED dióda a ak robot príde až na okraj ihriska, tak svieti červená LED dióda. Pôvodne som Light Emitting Brick Kit používal na testovanie robota s neLego snímačom DROD40 (Long Range Dual Infra Red Obstacle Detector), ale zistil som, že s týmto snímačom sa robot „vrhal“ aj po divákoch vzdialených vyše metra od ringu. Preto som nakoniec použil snímač DROD56, i keď teraz je robot trochu „krátkozraký“. Okraj ringu robot detekuje dvomi LegoLight snímačmi umistnenými vpredu a vzadu.

Procesor: Lego RCX (Hitachi H8)
Pamäť: 32kB
Frekvencia: 16MHz
Snímače: 2x LegoLight, 1x DROD56 (Short Range Dual Infra Red Obstacle Detector)
Pohon: 2x Lego motor
Napájanie: 6x 1.2V NiMH
Jazyk: NQC
Po úvodných rituáloch robot prejde polkruh, aby sa dostal za súpera, kde ho naberačkou podchytí a potom už tlačí, lebo súper ho asi nevidí.
V prípade, že táto rýchla taktika navyjde, tak sa robot Trasoriťka prechádza po ringu. Ak príde na okraj ringu, otočí sa a prechádza ringom na opačnú stranu. Ak v priebehu tohoto putovania robot detekuje súpera, vydá sa za ním.